Digital Production Arts
DPA 8070 3D Modeling and Animation with Jim Sidletsky
By: Benjamin B. Warner
Exercise 1: Primitives Robot
Date: August 26th, 2020
Objective:
Design and build a robot using only primitive shapes and basic manipulations (move, rotate, and scale).
Solution:
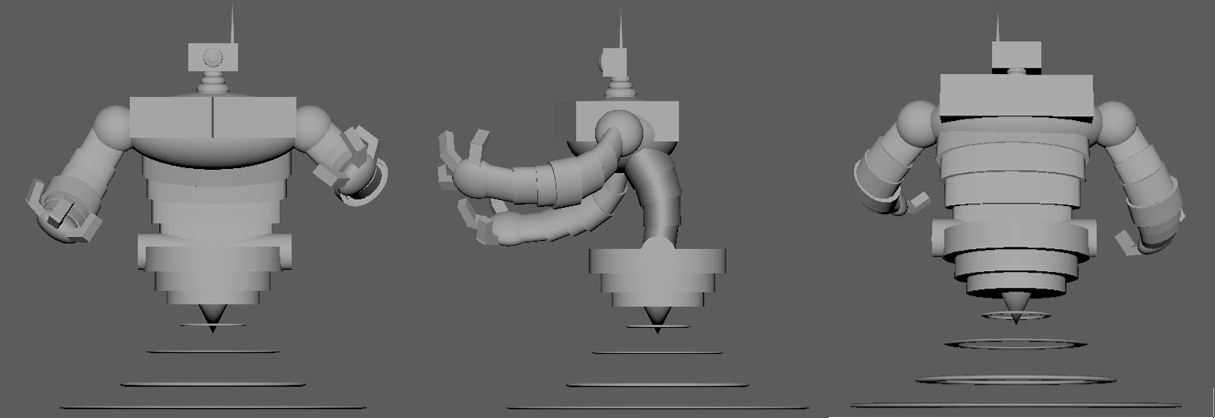
The Repulsor Grabber Mark 2, a theoretical mechanism with collapsible and articulated extremities. This model features repulsors to effortlessly glide around and powerful grabbers to pick up items of interest.
When queried about their purpose, the artificial intelligence in this unit may have an existential melt down.

Full Turnaround:
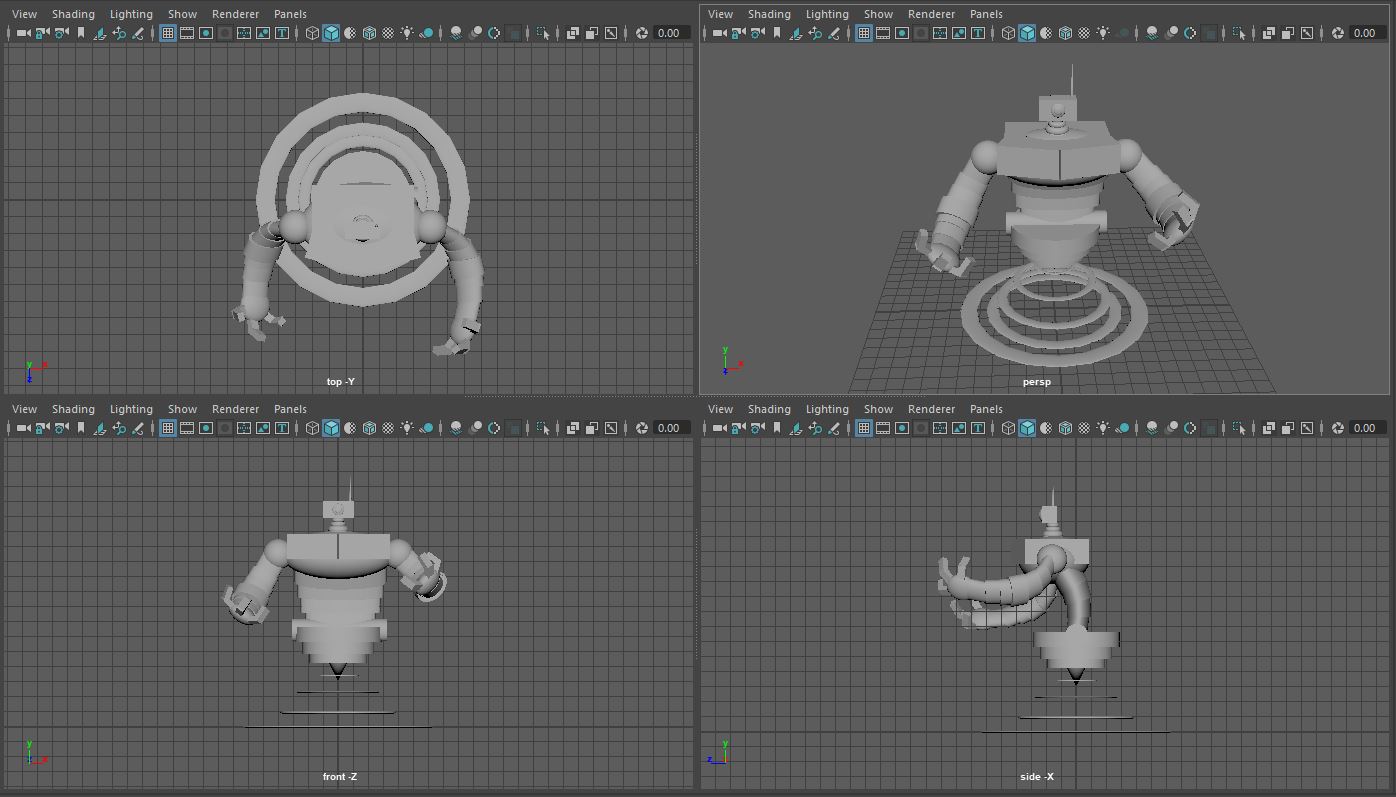
Maya Multiple View: